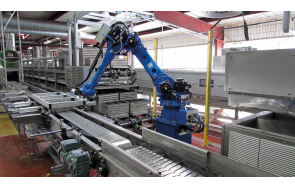
A family of robotic machines for delidding and depanning of bread type DEP - DEL
The machines of this family are designed for delidding and depanning of baked bread.
They are suitable for use on the automated industrial lines. They are designed so that they combine operations of two usual machines (depanner + delidder) performed within one cycle.
The machine is composed of: 5-axis industrial robot, gripper for delidding, multi-segment gripper with vacuum suction cups for bread, vacuum station and computer software. The machine assemblies are designed as a module and can be optionally combined. The machine is usually constructed on the basis of dimensions and weight of the product, pan's dimensions and line capacity.
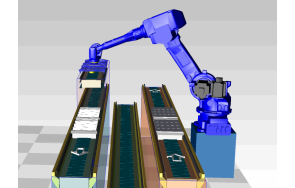
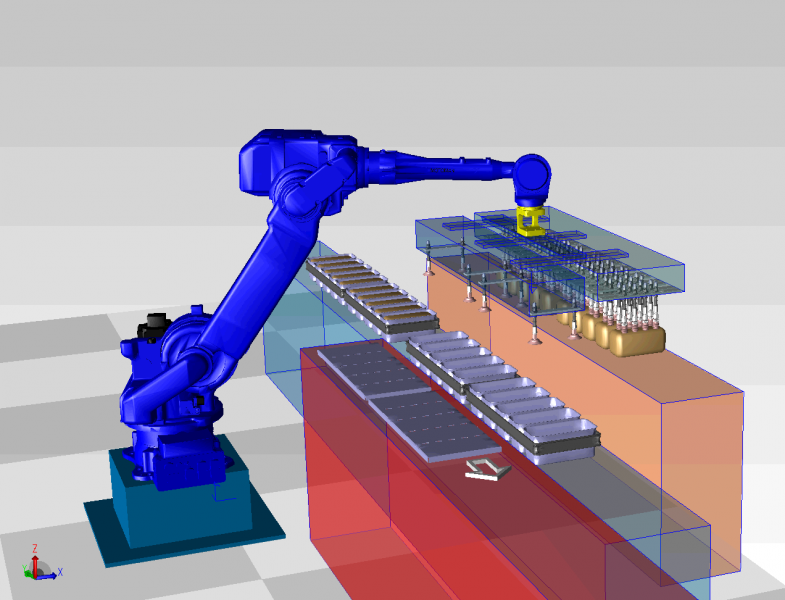
During production of products in pans without a lid (open top pans), bread »comes out« (is visible) from a pan. On their way to the machine area, pans go through two side air curtains. The sucked-in air separates the product from the internal wall of a pan. On the basis of automatically measured height of individual bread pieces, the gripper gets nearer to bread on an ideal distance and draws it out from individual beds (depanns) with suction cups and puts it on a pan conveyor, which transports it to the cooling area. However, when the production of toast takes place on the line (baking takes place on lidded pans), a few more operations are performed within one cycle.
First delidding takes place, the next operation is putting of lids on the product discharge conveyor, while, at the same time, suction cups stick on the toast's upper surface. Then, dropping of lids on the conveyor takes place, which takes them through the cooling tunnel to the start of the line and the gripper with a toast moves to the conveyor which takes bread to the cooling area. Each loaf of bread is drawn out (depanned) from a bed by 8 silicone suction cups, adequate for work at temperatures up to 220 °C. The controller which controls the operation of robotic hand is equipped with the servo drives of the last generation. It has an installed function of extreme energy saving up to 25 % of energy.
Advantages
Two machines combined in »one«.
Smaller layout (area) needed for machine installation.
»Optional« distance between conveyor belts, horizontally and vertically.
Possibility of use of different types of grippers:
2x4 - > 2 pans successively with 4 beds/pan
2x5 - > 2 pans successively with 5 beds/pan
2x6 - > 2 pans successively with 6 beds/pan
2x(2x4) - > 2 pans successively with 2x4 beds/pan
2x(2x5) - > 2 pans successively with 2x5 beds/pan
2x(2x6) - > 2 pans successively with 2x6 beds/pan
Machine can be equipped with a gripper for bread depanning.
Possibility of a »fine« adjustment of suction cups for each loaf of bread separately.
The same applies to suction cups for delidding.
Measuring of bread height above the edge of a pan and consequently, automatic adaptation of the suction head. Different capacities depending of the type of a pan and distances between the conveyors.
Robot repeatability: ± 0,07 mm
Technical data
| Machine capacity | up to 300 cycles/hour (depanner – delidder) |
| Machine capacity | up to 500 cycles/hour (depanner ) |
| Bread depanning capacity | depends on the number of beds in a pan |
| Delidding capacity | up to 600 lids/hour (2 lids/cycle simultaneously) |
| Vacuum | adjustable |